[vc_row][vc_column width=”1/4″][vc_btn title=”Back” style=”3d” align=”left” i_icon_fontawesome=”fa fa-arrow-left” add_icon=”true” link=”url:http%3A%2F%2Fblogs.qu.edu.qa%2Fee-sdp-sp2020%2Fmale-students%2Fmg7%2Fdesign-testing-and-validation_mg7%2Fpower-consumption-test-for-the-mcu-in-bluetooth-le-communication_mg7%2F|||”][/vc_column][vc_column width=”1/4″][vc_btn title=”Main Page” style=”3d” shape=”round” align=”center” i_icon_fontawesome=”fa fa-location-arrow” add_icon=”true” link=”url:http%3A%2F%2Fblogs.qu.edu.qa%2Fee-sdp-sp2020%2Fmale-students%2Fmg7%2F|||”][/vc_column][vc_column width=”1/4″][vc_btn title=”Home” style=”3d” shape=”round” align=”center” i_icon_fontawesome=”fa fa-home” add_icon=”true” link=”url:http%3A%2F%2Fblogs.qu.edu.qa%2Fee-sdp-sp2020%2Fmale-students%2Fmg7%2Fhome%2F|||”][/vc_column][vc_column width=”1/4″][vc_btn title=”Next” style=”3d” align=”right” i_align=”right” i_icon_fontawesome=”fa fa-arrow-right” add_icon=”true” link=”url:http%3A%2F%2Fblogs.qu.edu.qa%2Fee-sdp-sp2020%2Fmale-students%2Fmg7%2Fdesign-testing-and-validation_mg7%2Fdata-sampling-rate-testing_mg7%2F|||”][/vc_column][/vc_row][vc_row][vc_column][vc_column_text]Prior to the addition of the Temperature Sensor in the project, the team wanted to work only on the Gait Cycle. But unfortunately, the IMU readings were not showing promising results for Feature Extraction and Classification based on Machine Learning, which has been done now on vGRF only.
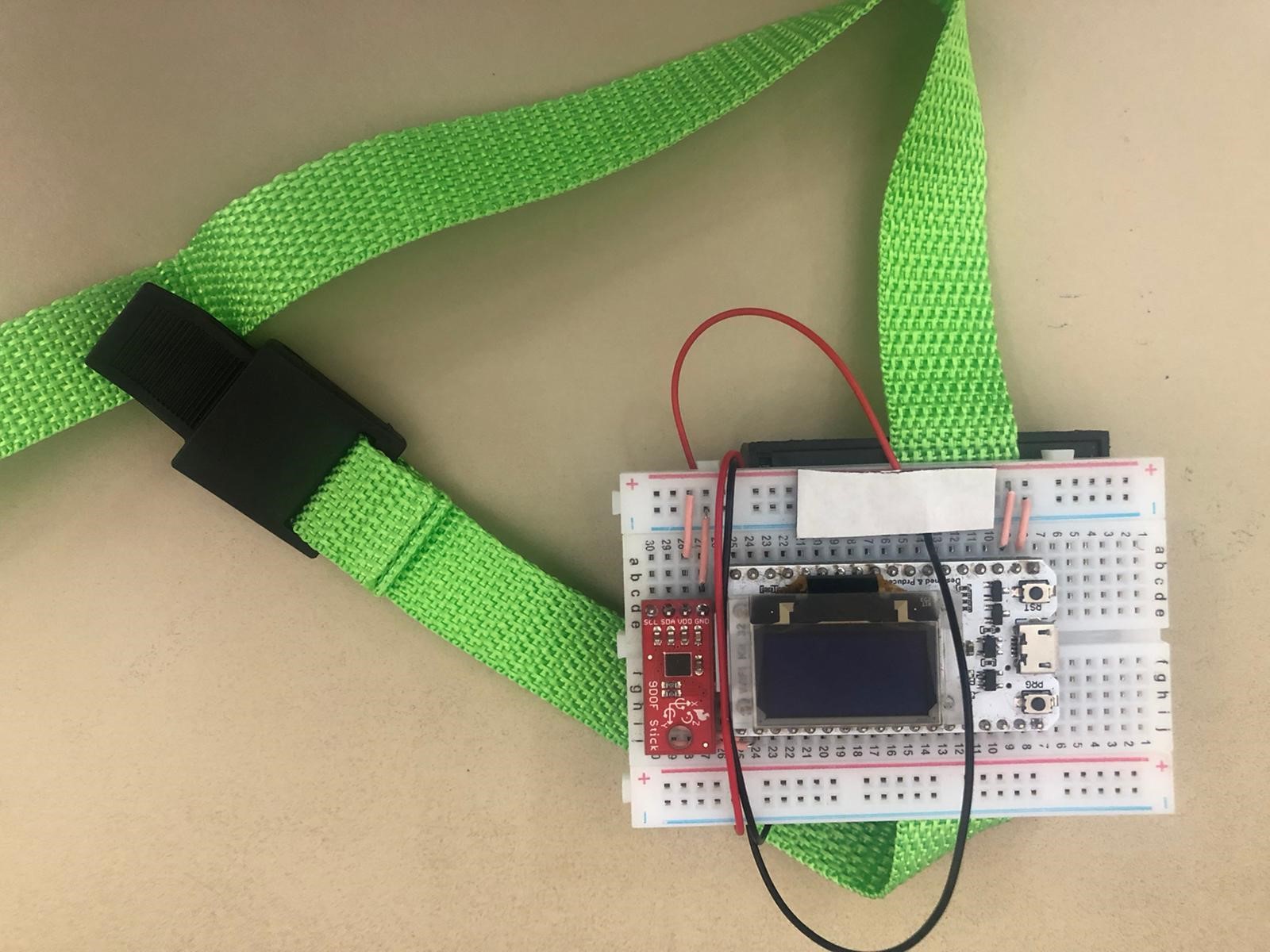
Gait Cycle of one of the team members was acquired by the peripheral system developed on a breadboard. The IMU data was recorded with the help of esp32 and transferred wirelessly using BLE to a central device. The Peripheral system is shown in the figure below:
The person could walk for a minute around the lab with this system tied to his leg, and the data was collected in an excel file from the Arduino IDE. Twelve types of data were plotted to visualize the presence of any trend in the IMU readings. The parameters were Ax, Ay, Az, Gz, Gy, Gz, Mx, My, Mz, Roll, Pitch, and Yaw. The plots are provided below in the table below:
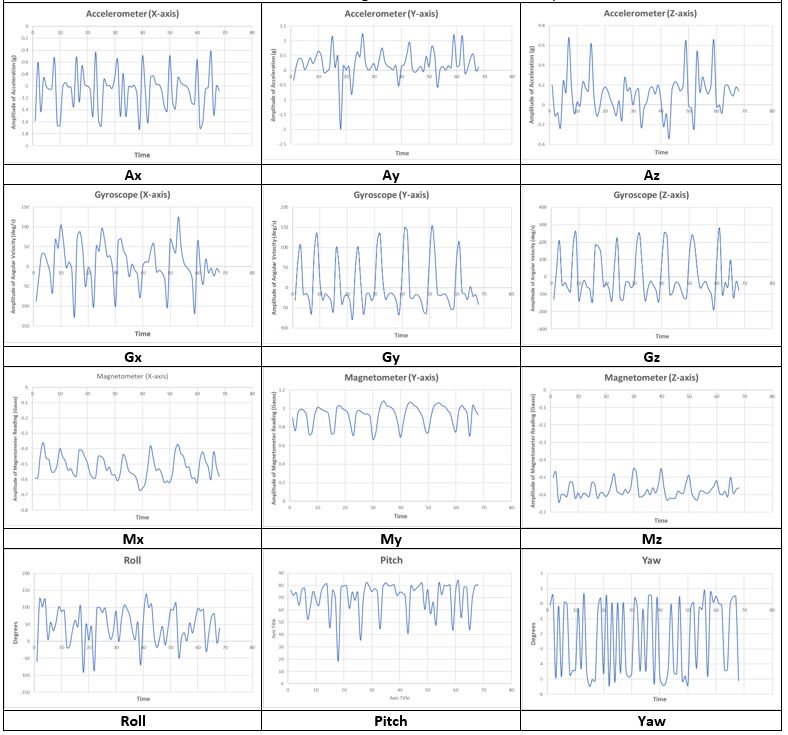
After reviewing the plots, patterns could be observed over the walking phase, more or less in all parameters. But in the case of some parameters like Accelerometer (x-axis), Gyroscope (y and z-axis), Magnetometer (y-axis), the pattern was really obvious, and having obvious patterns make any dataset suitable for ML-based Classification. But the pattern or features much change and remain unique for each class.
For IMU data, it can be ascertained after recording data of many types of patients. The PCB made by the SDP team already has an Inertial Measurement Unit (IMU) with 9-Degree of Freedom (DOF) embedded into it, which can be utilized in the future. In fact, a few reasons why the team believe that these readings can be significantly improved are:
- The setup showed in first figure was just a temporary, proxy setup. The green ribbon could not be tightly attached to the leg, and the breadboard was wobbly. This added an extra bit of noise while walking, which distorted the plots. Moreover, the IMU itself is soldered to a PCB now, and the PCB is tightly screwed to the box. The box will be held tightly to the leg with the help of a flexible VELCRO belt, as shown earlier. This will reduce the noises a lot and provide pure IMU curves.
- In some of the plots, there were distortions in the beginning and in the end. This is due to the irregular walking pattern by the student under test (it was not done very strictly since it was not a medical setup). In a more controlled setup, the team expects a better outcome.
Not considering the toll it will have on the Data transfer and Sampling Rate, just adding the code for the IMU can be added to the present Peripheral Code in order to receive all data.[/vc_column_text][/vc_column][/vc_row][vc_row][vc_column width=”1/4″][vc_btn title=”Back” style=”3d” align=”left” i_icon_fontawesome=”fa fa-arrow-left” add_icon=”true” link=”url:http%3A%2F%2Fblogs.qu.edu.qa%2Fee-sdp-sp2020%2Fmale-students%2Fmg7%2Fdesign-testing-and-validation_mg7%2F|||”][/vc_column][vc_column width=”1/4″][vc_btn title=”Main Page” style=”3d” shape=”round” align=”center” i_icon_fontawesome=”fa fa-location-arrow” add_icon=”true” link=”url:http%3A%2F%2Fblogs.qu.edu.qa%2Fee-sdp-sp2020%2Fmale-students%2Fmg7%2F|||”][/vc_column][vc_column width=”1/4″][vc_btn title=”Home” style=”3d” shape=”round” align=”center” i_icon_fontawesome=”fa fa-home” add_icon=”true” link=”url:http%3A%2F%2Fblogs.qu.edu.qa%2Fee-sdp-sp2020%2Fmale-students%2Fmg7%2Fhome%2F|||”][/vc_column][vc_column width=”1/4″][vc_btn title=”Next” style=”3d” align=”right” i_align=”right” i_icon_fontawesome=”fa fa-arrow-right” add_icon=”true” link=”url:http%3A%2F%2Fblogs.qu.edu.qa%2Fee-sdp-sp2020%2Fmale-students%2Fmg7%2Fdesign-testing-and-validation_mg7%2Fdata-sampling-rate-testing_mg7%2F|||”][/vc_column][/vc_row]