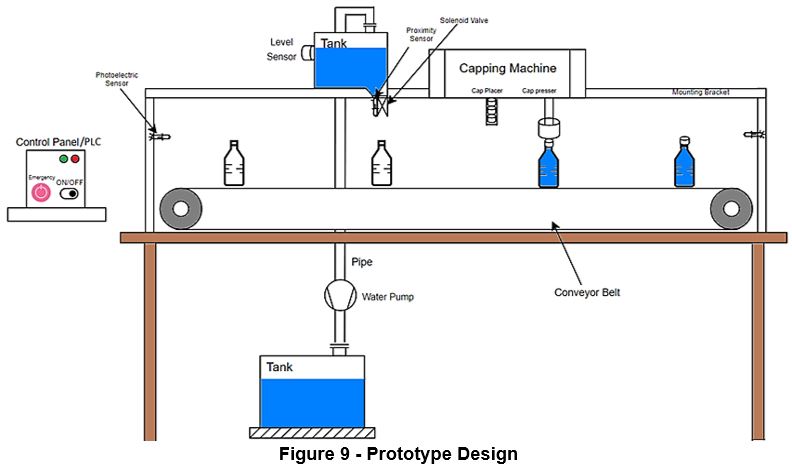
In the figure above, a simple illustration of the hardware is shown. When the system is turned on using the main switch, conveyor belt starts moving, when something is placed on it, it gets moved to the center with some mounting brackets and gets moved along until the photoelectric sensor detects a bottle beneath it, then the conveyor belt stops and solenoid valve opens to let water through to fill the bottle for a certain period of time. Next, the conveyor belt continues to move the bottle until it reaches the capping machine, which then does the capping process, the conveyor belt then continues to move the bottle until it reaches the endpoint. Additionally, when the mounted tank’s water level decreases below the desired level, the water level sensor will detect that which leads the pump to start moving water from the tank placed at floor level to the upper mounted tank, while making sure that the level of the water in the tank remaining at around a small range in order to keep the pressure consistent to make sure every bottle is filled for the same amount. All these controls and time-based processes will be done by the PLC. In case of emergency, the emergency button is pressed, and the entire system is turned off immediately. Additional sensors mounted on the side to detect and accidental human interaction which causes the system to also turn off.