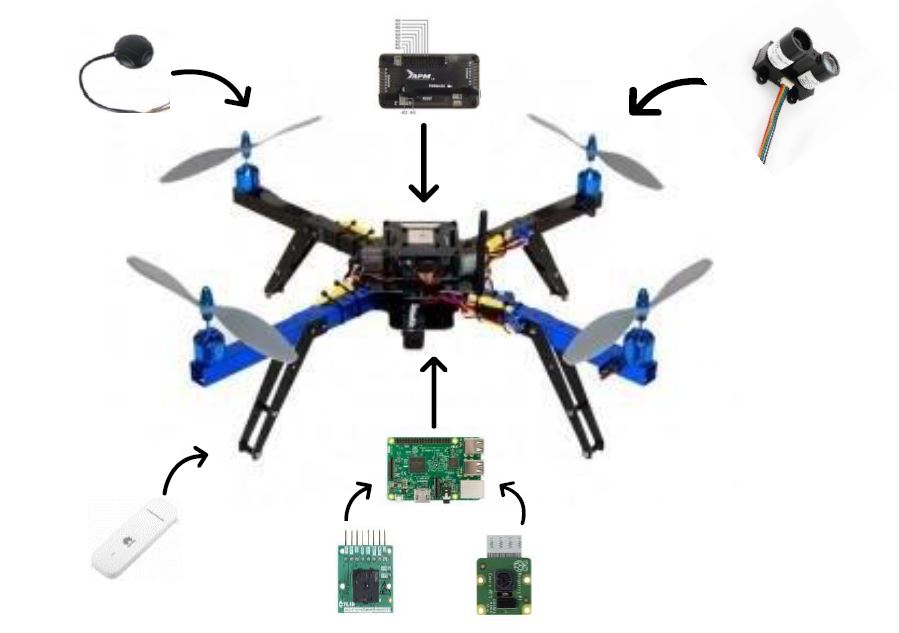
The figure below shows the designed system for the quadcopter, there are four Lidars that take place at each propeller, and then all the Lidars will be connected to the Raspberry Pi 3 Model B+. The aim of using Lidar sensors is to ensure that no collision occurs between the drone and the tower. Lidar is working in the principle of measuring the distance though transmitting a laser signal that will hit the target, then the receiver receives bounced laser signal by calculating the time delay between transmission and receiving process. Raspberry Pi Camera Module V2 will be used to transfer live video streaming while the drone flying, to ensure that it is in a good position, so the thermal camera can measure only in front of windows, not something else. Moreover, to measure the cooling leakage from different spots of the tower, the thermal camera will be used to take thermal images. Lidar sensors, thermal camera, and Pi camera module will be connected to the Raspberry Pi to collect all the data and then it will transfer all the data to the 4G stick which has been chosen because of the high coverage of the 4G (LTE) network. Besides, GPS stick will be used for localization processes and as a tracker of the drone to be safe. The quadcopter will fly vertically and take the measurement at different levels of the building and take the measurement at different distances.